Design of a Delta Configuration Tree Climbing Robot using Four-Bar Linkage
DOI:
https://doi.org/10.37934/ard.134.1.112122Keywords:
tree climbing robot (TCR), agricultural automation, agricultural roboticsAbstract
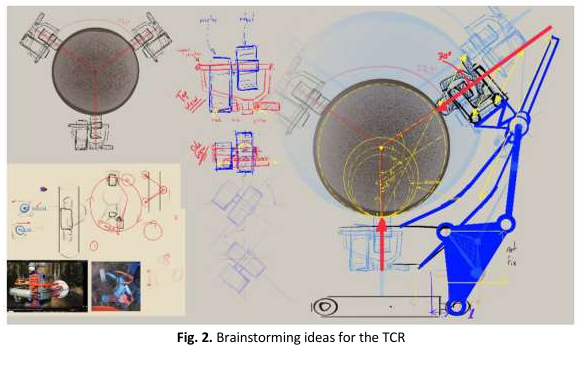
This paper introduces the development and evaluation of a tree climbing robot (TCR) with the purpose of automating labour-intensive agricultural tasks, including coconut harvesting, agarwood collection and rubber tapping. The TCR was engineered to accommodate a wide range of tree trunk dimensions and bear loads exceeding its own weight, thereby enhancing efficiency and safety in such operations. The robot is equipped with a one-degree-of-freedom linear armature linkage, allowing it to move along both vertical and horizontal paths on tree trunks. The TCR's ability to operate on diverse tree surfaces is dependent on key design principles such as manoeuvrability, robustness, simplicity, adaptiveness, compactness and speed. The mechanical design incorporates a flexible gripping mechanism that adjusts to trunk diameters spanning from 20 cm to 50 cm, while the electrical systems guarantee accurate control and movement. The study incorporates practical experimentation of a functional prototype, which showcased the TCR's capacity to transport loads ranging from 5 to 10 kg in different circumstances. The results obtained from these tests, which were backed by design simulations, confirm the robot's efficacy and indicate potential areas for further improvement. The results suggest that the TCR provides a feasible solution for automating agricultural tasks that involve trees, which could result in substantial increases in productivity and enhanced worker safety. The TCR's pioneering design and successful testing highlight its potential influence on the agricultural robotics industry.
Downloads
Downloads
Published
How to Cite
Issue
Section