Pothole Detection using Deep Learning
Keywords:
Pothole, autonomous vehicle, YOLOv4, convolution neural networkAbstract
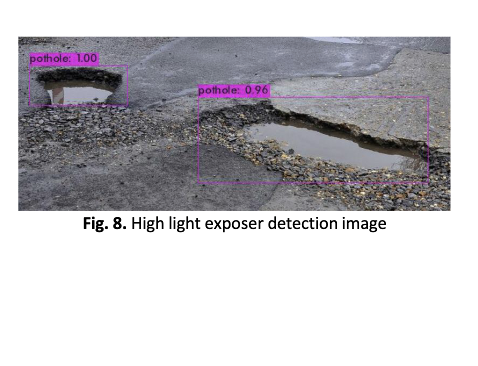
Malaysia is a country that experience hot and rain conditions throughout the year. Due to this climate situation, potholes can be easily formed on the road surface. The formation of potholes happens when there is a crack on the pavement surface allowing rain water to enter through the crack. The crack is formed due to the expenditure of asphalt during hot periods and the contraction of asphalt during cold temperatures. To avoid the damage and injuries caused by potholes to vehicles and drivers, the idea of pothole detection was created. The potholes detection was estimated to help drivers avoid potholes by giving an early warning. The detection can also help Autonomous Vehicle (AV) industry to create a vehicle that can avoid potholes automatically. The detection method that was used in this project was a 2D vision-based method that has low development cost due to applying camera as the detection device. The 2D vision-based method was in computer vision field, combining with deep learning. You Only Look Once Version 4 (YOLOv4) was used as object detection algorithm due to fast detection in real-time and high Average Precision (AP) value. The selected object detection algorithm used Convolution Neural Network (CNN) architecture, containing 75 convolution layers. Image annotation tool software named labelimg was used to create the dataset for training an object detection. The finished potholes detection procedure was tested with the same image but different light quantity. The test was separated into three different light exposer, high, low and very low. The purpose of this test was to measure the effectiveness of the detection during high light quantity, low light quantity and very low light exposures. The parameters were number of batches iteration and threshold value. From the analysis 9000 batches iteration and 90% threshold value was chosen to run the pothole detection. Based on these two selected parameters used during the detection process the project was a success with Average Precision (AP) above 80% and frame rate as low as 30 FPS. Overall, this method was the effective way to increase the detection accuracy and confidence.
Downloads