Investigation of Human Robot Collaboration Safety Based on Speed and Separating Monitoring
DOI:
https://doi.org/10.37934/ard.138.1.96104Keywords:
Speed and separating monitoring, Machine Learning, artificial intelligence, machine vision, serial robotic armAbstract
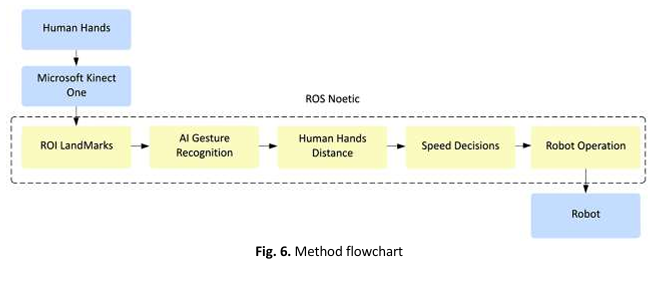
The increasing focus on robotics safety underscores the importance of establishing rigorous standards to protect human operators. ISO/TS 15066 is a pivotal standard that reflects this concern, providing guidelines for human robot collaboration (HRC). This paper focuses on one out of four main techniques in safety standard, which is speed and separation monitoring. The novelty lies in the integration of Machine Learning (ML), Artificial Intelligence (AI), and Robot Operating System (ROS) to enhance decision accuracy. The test rig involves a 4-degree-of-freedom (DOF) serial robotic arm and Microsoft Kinect One, adept at recognizing gesture signs and tracking hand movements. Moreover, the system ensures safety by adjusting the robot’s speed dynamically, even coming to a stop if necessary. The result shows improvement in decision-making. This demonstrates a significant contribution to advancing safety standards in robotics.
Downloads
Downloads
Published
How to Cite
Issue
Section