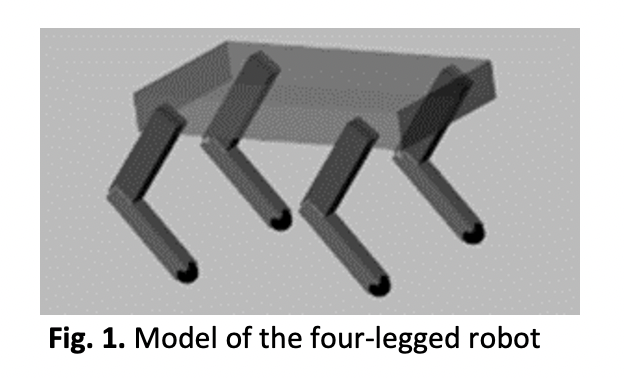
Foot-Ground Contact Modelling of Quadruped Robot
Keywords:
Quadruped robots, Dynamic modeling, MATLAB, Simmechanics^TM, Simulation, FrictionAbstract
A lot of studies have focused on legged robots, and the goal is to create machines with features similar to those that exist in biological living things. However, this goal remains relatively distant, and construction of models for such studies is costly as well as time consuming, which leads to the design models that can facilitate the research by using software. The fundamental characteristics of biological creatures that are relevant to locomotion investigations should be included in these models. This study described the details of constructing a four-legged robot model in MATLAB/ software. A simulation model for a multi-legged locomotion mechanism with two degrees of freedom for each leg was presented. The foot-ground contact is represented by a non-linear spring dashpot system, which the parameters were obtained from soil mechanics investigations using the theoretical model given in the literature. Finally, the generated simulation model's performance is tested by a series of trials, while the robot leg joints are controlled using fractional order algorithms. A configuration file that comes with the model allows you to simply adjust the robot's parameters. This study also discusses the robot model with a flexible body, legs, hip, and knee joints.
Downloads