Autonomous Robot Car Simulation and Control using Mobile Application
Keywords:
Autonomous cars, Robot Operating System (ROS), ROS-MobileAbstract
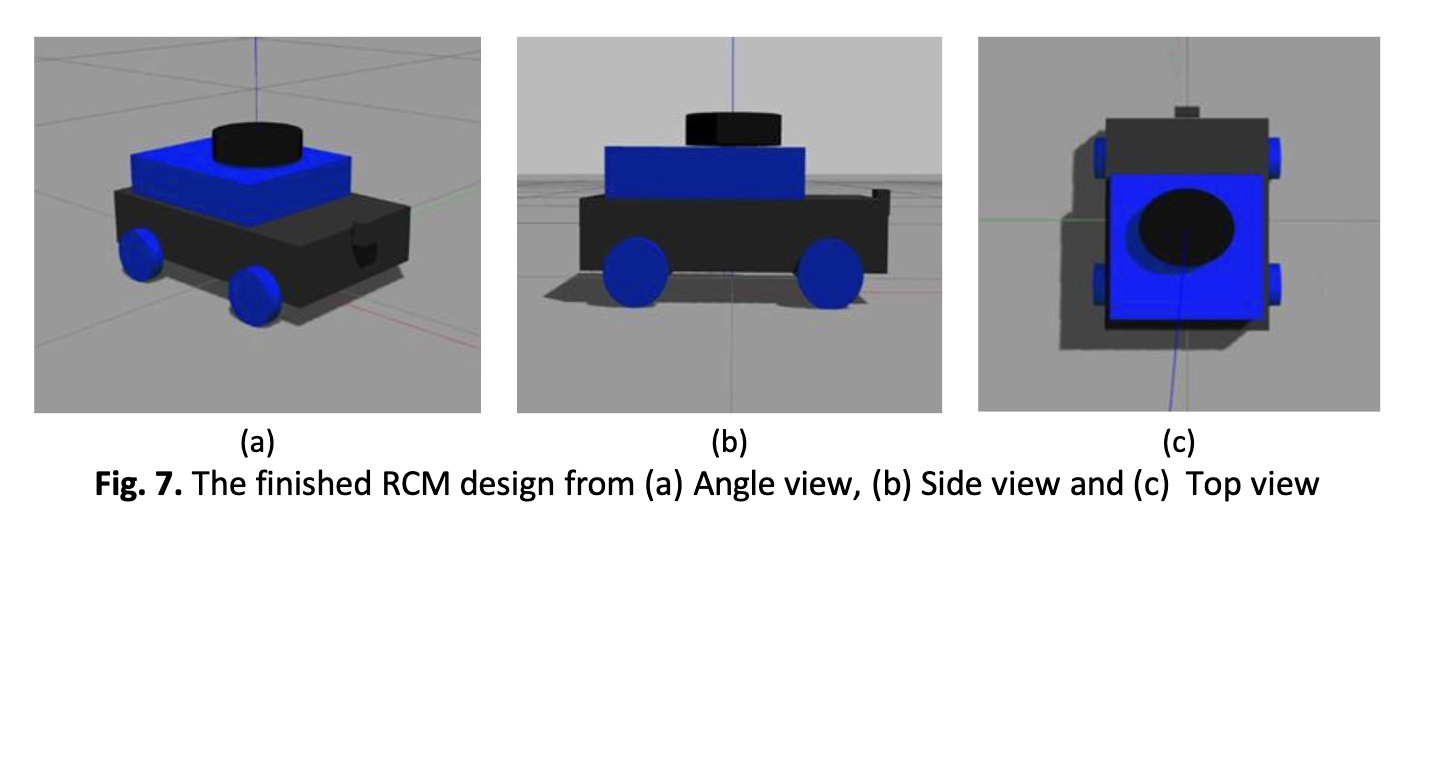
Autonomous cars are becoming more and more relevant as time progresses. Companies are continuously developing better and smarter vehicles that act similarly to human driving behaviour. Many researchers have done projects regarding robot cars, autonomous or not, with different means of controlling them but not many are researching mobile applications as an alternative means to control autonomous vehicles. Mobile apps open to potential versatilities in terms of user interaction and accessibility with their vehicles. This paper proposes to simulate an autonomous robot car in a 3D simulation using the mobile app. In this paper, a 3D robot car was designed using the Robot Operating System (ROS) as the middleware for the robot simulation development, alongside with Gazebo simulator which provides the 3D environment for the simulation. Then, using mapping algorithm to train the robot car to map the simulation environment before testing the robot car’s autonomous driving capabilities. The simulation was then tested through a phone application called ROS-Mobile by giving control commands and applying visual angles of the robot car from the mobile app. The mobile app was able to connect to the simulation via connecting IP addresses and users can control and visualize the robot car simulation from the mobile app.
Downloads