Open-Source Project (OSPs) Platform for Outdoor Quadcopter
Keywords:
UAV, quadcopter, open-sourceAbstract
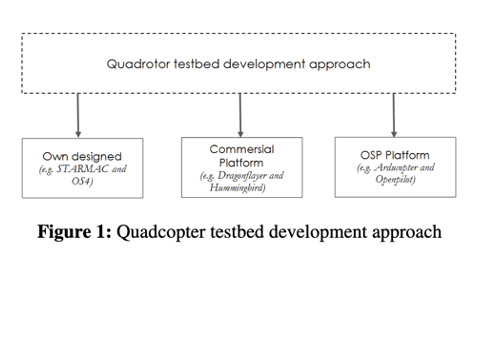
In recent years, there has been an increasing interest in quadcopter technology implementation in the real world; for instance in real estate photography, aerial surveying, periodic forest monitoring, and search/rescue missions. Generally, each quadcopter implementation required different sensors which are needed to attach and integrate into quadcopter system. However, the most critical part in almost cases is preparing the quadcopter flight performance and capability to be suited in any outdoor applications. Because of that reason, this paper has proposed an implementation of Open-Source Project (OSPs) platform as autonomous Unmanned Aerial Vehicle (UAV) quadcopter development that can be fitted for any outdoor applications or even in research experimental purposes. We started out with an explanation about the general approach that has been used in the development of a quadcopter testbed, and then followed with detail explanations in the OSP platform approach. The OSP platform is the most popular approach. The main reason is because of their flexibility in both hardware and software. The basic quadcopter configuration for autonomous flight also presented and applied. This paper also provided several outdoor experiments results in uncontrolled environment that have been executed using our developed testbed to evaluate their performance, such as attitude and altitude stabilization, interference and vibration effect, and trajectory mapping generation. Finally, throughout this project, we realized that the OPSs quadcopter platform has offered almost complete frameworks in the development of quadcopter for any outdoor applications or even as a research testbed system.
Downloads